编辑:无损检测证书挂靠 时间:2025-01-18 10:54:09
刘建(1997—),男,硕士研究生,主要从事超声无损检测方面的研究工作
列车车轴是其走行部件中的重要组成部分,为确保车辆安全运行,需要对车轴工况进行定期检测。车轴疲劳裂纹是引起车轴断裂的主要因素,主要发生在传动轮座、齿轮座、压力制动机转盘座等配合压装过盈部位,可能导致车轴的断裂[1-2]。一直以来,如何进一步提高列车车轴缺陷检测能力和准确性,是无损检测技术领域中重要的研究课题。
随着无损检测技术的发展,车轴探伤从早期的人工手持常规超声波探头探伤、声发射故障检测和磁粉检测,逐步转变为基于相控阵超声检测的自动化探伤[3]、直流电位降检测[4]和非接触式超声检测[5]等,消除了常规人工超声检测扫查范围小、效率低、耦合不良等问题,实现了具有多角度、大范围、多点聚焦等功能的自动电子扫查,提高了检测效率、扫查范围和缺陷检测能力。由于轮对的轮轴接触界面[6]受到应力集中、界面粗糙和微动腐蚀等因素的影响,故超声信号易被噪声干扰,有学者为了提高缺陷信号特征,在进行信号特征分析的基础上,采用小波包变换对检测信号进行局部时频域分析[7],提取缺陷信号特征系数和幅值系数,将重建后的波形作为判别车轴镶入部是否存在疲劳裂纹缺陷的依据,然而在噪声信号幅值较大的情况下,缺陷信号仍会被淹没在噪声信号中,而无法准确识别,制约了车轴缺陷的检出率。
近年来,深度学习在列车各部件异常识别和缺陷检测中得到了广泛应用。ZHENG等[8]提出了深度迁移学习(DTL)框架,采用两种对象检测算法(YOLO v3和RetaNet)在公共对象(COCO)数据集[9]上进行预训练,并利用轨道缺陷的图像定位缺陷。LIU等[10]提出了一种结合目标检测模型的“DeepAugment”数据增强策略,通过模型测试增强后的图像,提高了内部裂纹检测的识别精度和置信度。YU等[11]开发了一种由粗到细的模型(CTFM),该模型依次在子图像、区域和像素级别上实现了轨道缺陷的有效分割。
针对车轴超声检测中镶入部缺陷信号易被噪声干扰而出现的缺陷检出率低的情况,提出了一种基于YOLO v5s网络的目标检测算法,构建了改进的网络模型,通过仿真数据、GAN生成式数据和实际检测数据构建混合样本数据集,以此训练网络,最后进行了实际列车车轴缺陷验证试验,结果表明,所提方法实现了对噪声干扰的有效抑制,提高了对微弱缺陷信号的准确识别能力。
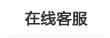
超声检测主要包括A、B、C等扫描,在相控阵超声检测中,A扫将换能器发射后接收到的回波信号进行一维显示,通过观察始波与底波信号之间是否有回波信号,可判断被测件内部的缺陷情况。B扫将多条A扫进行叠加,用于显示换能器移动方向和发射声束轴线所确定的二维截面检测图像。列车车轴镶入部缺陷超声检测原理如图1所示,文章采用扇形扫描的方式对车轴进行一周的全面检查。
如图1所示,探头在一周的扫查中移动的步进次数为m,根据扇形扫描偏转和聚焦延时的计算原理,单个角度的波束相干叠加形成A扫,当一次扇扫有n个角度时,可生成n个不同的A扫结果Ai(i=1,2,... ,n)。通过将不同扫描步径中相同入射角度的A扫结果Ai j(i=1,2,... ,n;j=0,1,... ,m)叠加形成B扫,生成车轴镶入部缺陷的超声检测图像。
目前,主流的目标检测模型分为两种:二阶段模型(two-stage)和一阶段模型(one-stage)。其中,二阶段目标检测模型先生成候选目标区域(region proposal),后利用卷积神经网络进行样本的分类和回归,其代表性网络模型包括 R-CNN[12]、SPP-Net[13]、Fast R-CNN[14]、Faster R-CNN[15] 和 R-FCN[16] 等;一阶段目标检测模型直接在网络中提取特征,预测物体的类别和位置,可减少网络的训练时间和模型的复杂程度,速度较快,更适合移动端的部署,其代表性网络模型包括 SSD[17]、RetinaNet[18] 和 YOLO 系列等
相比之前的YOLO系列目标检测模型,YOLO v5更加注重小目标检测,有较高的精度和速度,包括5个版本,分别为YOLO v5n、YOLO v5s、YOLO v5m、YOLO v51、YOLO 5x,这些模型的宽度和深度不同,能适应不同的数据集。考虑到实时检测和部署的需求,笔者选择参数量和计算量较少的 YOLO v5s 模型作为基础模型
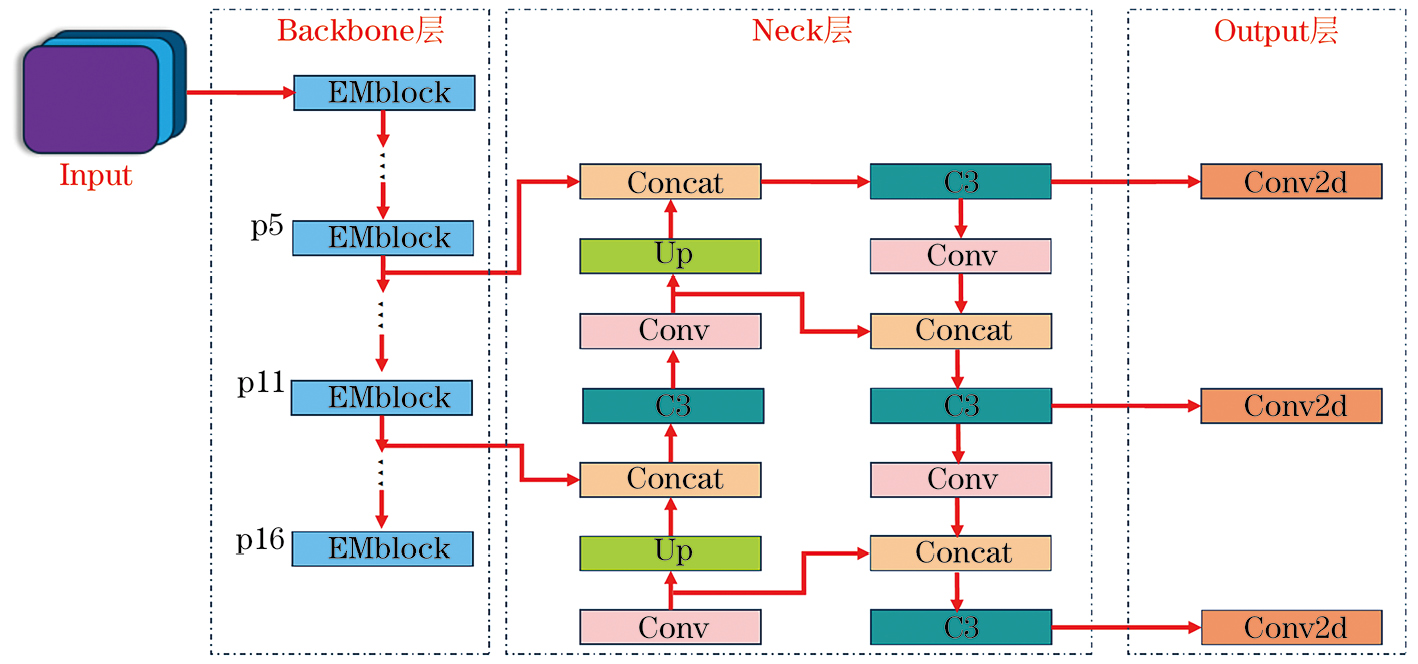
所提EM-YOLO v5s网络结构如图2所示,Backbone层网络参数如表1所示,表中Hi和Wi分别为分辨率的长和宽。该模型基于YOLO v5s变体构建,由Backbone层、Neck层和Output层等主要结构组成。其中Backbone层利用替换后的EMblock模块来提取输入数据的特征信息;Neck层是一个特征金字塔结构,将浅层的图形特征和浅层的语义特征结合在一起;Output层使用3个1×1(长×宽,下同)卷积层作为输出。
| Stage(阶)i | Operator(操作)Fi | Resolution(分辨率)Hi×Wi | Channels(通道)Ci | Layers(层)Li |
|---|---|---|---|---|
| 1 | Conv3×3 | 640×640 | 32 | 1 |
| 2 | EMblock,k3×3 | 320×320 | 16 | 1 |
| 3 | EMblock,k3×3 | 320×320 | 24 | 2 |
| 4 | EMblock,k5×5 | 160×160 | 40 | 2 |
| 5 | EMblock,k3×3 | 80×80 | 80 | 3 |
| 6 | EMblock,k5×5 | 40×40 | 112 | 3 |
| 7 | EMblock,k5×5 | 40×40 | 192 | 4 |
| 8 | EMblock,k3×3 | 20×20 | 320 | 1 |
| 9 | Conv1×1&Pooling&FC | 20×20 | 1 024 | 1 |
网络中使用的EMblock模块结构如图3所示,其采用一个尺寸为1×1的CBH模块对输入数据进行升维,再通过尺寸为k×k的CBH模块提取1×1数据特征信息,而SE空间注意力机制模块在不引入额外参数的情况下,通过学习得到每个通道的权重,从而引导网络更加关注当前任务的重要特征,Conv模块用于最终输出的准备。此外,还采用Dropout模块进行正则化处理增强泛化能力,以及全连接处理防止网络梯度爆炸。以上模块构成了EMblock模块,用于对输入数据进行特征提取和处理。

试验所用深度学习模型的开发基于PyTorch 1.7.0框架,使用Python作为主要开发语言。在模型训练过程中,采用随机梯度下降(SGD)作为优化器,设置动量(momentum)为0.3。每次训练批次(Batch size)为2,初始学习率为0.01。为了获得理想的性能,共进行了500次训练epochs。
数据集由CIVA仿真数据、GAN网络生成式数据和原始实际车轴缺陷超声检测数据混合组成,其中包括尺寸在0.5 mm以内的微小缺陷。由于缺陷样本数量有限,笔者采用GAN网络生成式、CIVA仿真和剪裁等方法进行了数据扩充。
实际车轴缺陷超声检测数据采用尺寸为626像素×8 100像素(宽×长)的B扫图像,共240个B扫图像形成样本,其中120个样本(50%)用作训练数据集,100个样本(42%)用作测试集,20个样本(8%)为验证集。
通过裁剪(Crop)B扫缺陷部分图像和叠加不同B扫背景的方式形成新的样本,利用背景噪声较弱的区域进行剪裁,并叠加较强形式的噪声,以增加缺陷背景噪声的多样性。经过裁剪扩充了2 500组样本,其中1 200组样本(48%)用作训练数据集,1 000组样本(40%)用作测试集,另外300组样本(12%)作为验证集。裁剪和叠加后的样本图像尺寸为626像素×810像素(宽×长)。
基于深度学习的列车车轴缺陷检测,通常存在样本量较少、网络模型泛化能力弱等问题,采用GAN生成式方法可有效扩增样本,基于Sin-GAN网络,通过缺陷图像的学习训练,捕获图像中斑块的内部分布,能够生成高质量、多样化的样本,并携带与原始图像相同的视觉内容,笔者通过这种方法扩充了约3 000组样本。
基于CIVA仿真平台对车轴镶入部位超声检测进行了仿真,包括压装回波、缺陷回波以及周期性干扰信号的仿真。由于车轴镶入部位压装回波的特殊性,首先对压装回波进行仿真,车轴压装后,螺纹状刀痕类似一系列直径为0.08 mm的横通孔,当超声声束扩散后,在主声束覆盖范围内的螺纹状刀痕均会形成“缺陷”反射信号,将这些缺陷信号一个个叠加在一起就形成了有规律的周期性镶入部噪声信号,得到压装回波的仿真结果后,对车轴整体进行建模,并建立深度为0.5 mm的裂缝缺陷,通过仿真生成了3 000组样本。
通过原始实际数据裁剪、GAN生成式方法和CIVA仿真,构建了6 120组训练样本,数据集扩增及分类结果如表2所示。裁剪有助于去除噪声并集中关注重要特征;GAN生成则增加了训练数据的多样性,改善了模型的生成能力;CIVA仿真则进一步增加了合成数据的丰富性,使模型能更全面地学习特定任务。
| 数据集 | 训练数据 | 测试数据 | 验证数据 |
|---|---|---|---|
| Raw | 120 | 100 | 20 |
| Crop | 1 200 | 1 000 | 300 |
| GAN | 2 400 | 0 | 600 |
| Simulation | 2 400 | 0 | 600 |
| 总计 | 6 120 | 1 100 | 1 520 |
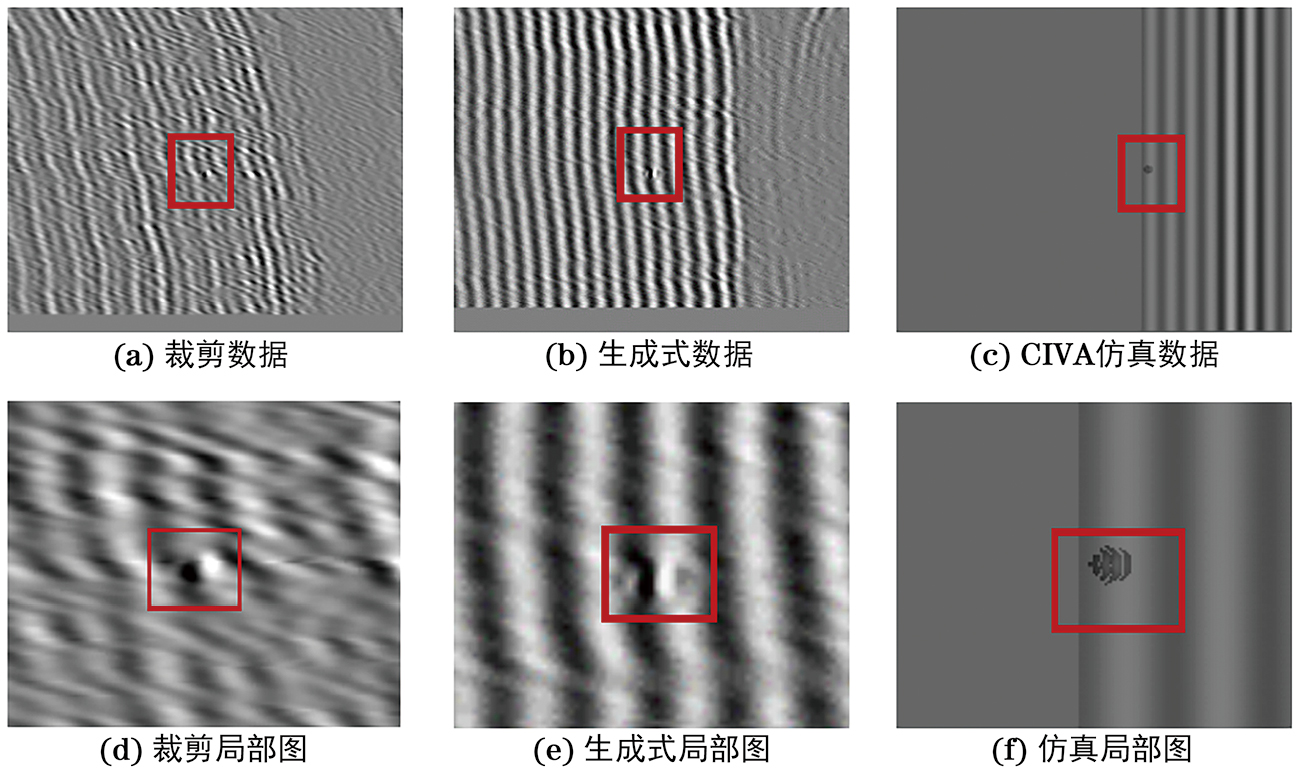
测试集1 100组数据和验证集1 500组数据的划分有助于评估模型性能,确保其在实际应用中具有鲁棒性和泛化性。这一整合方法显著提高了模型的训练效果和实际应用价值。3种数据增强方法的效果如图4所示,其中缺陷用红框标注。
采用精确率(Precision)和召回率(Recall)作为评价指标,结合检出率、漏检率和误报率来评估模型在实际场景中的应用能力。
精确率表示在模型将样本识别为正类的情况下,真正为正类的样本所占的比例,通常情况下,精确率越高,说明模型的效果越好。
召回率反映了在实际正样本中,分类器能够正确预测出多少,表示模型正确识别为正类的样本数量占总的正类样本数量的比例,通常情况下,召回率越高,说明模型更有效地捕捉到正类样本,模型的效果越好。
在工业缺陷检测中常采用检出率、误报率和漏检率等指标评价检测效果,工业检出率T表示检出的缺陷个数K与总的缺陷个数N的比值,误报率表示误报的缺陷个数Q与总的缺陷个数N的比值,漏检率M与检出率T的和为1。
试验的主要目的是验证深度学习网络在处理超声检测数据方面的有效性,不同增强数据的识别准确率对比如表3所示,表中为实际数据集(Real)、裁剪数据集(Crop)、裁剪加仿真数据集(Crop+Simulation)以及混合数据集(Crop+Simulation+GAN)进行网络训练和测试的结果。
| 数据集 | 准确率/% | 召回率/% |
|---|---|---|
| Real | 94.49 | 91.38 |
| Crop | 98.73 | 98.94 |
| Crop+Simulation | 99.26 | 99.03 |
| Crop+Simulation+GAN | 99.31 | 99.73 |
可以看出,直接采用实际数据的准确率为94.49%,召回率为91.38%,基本能满足应用要求;扩增数据样本后,可看到3种方法扩增样本的结果水平都有明显改善,其中混合数据集方式的效果最好,准确率达到了99.31%,表明其对正样本分类的准确性较高,且召回率达到了99.73%,显示其对正样本的覆盖能力较强。
采用所构建的数据集,在相同的训练方式下,用所提方法与YOLO v5s及同类方法进行比较,其结果如表4所示,可见,所提方法的精确率达到了99.89%,召回率达到了100%,与其他方法相比,所提方法在精确率和召回率上分别提高了0.29%和0.11%,表明采用嵌入EMblock模块有助于网络模型对提取特征进行细化并突出关键特征信息。
| 方法 | 准确率% | 召回率% |
|---|---|---|
| YOLO v5n6 | 99.60 | 99.66 |
| YOLO v5s | 99.60 | 99.89 |
| 所提方法 | 99.89 | 100 |
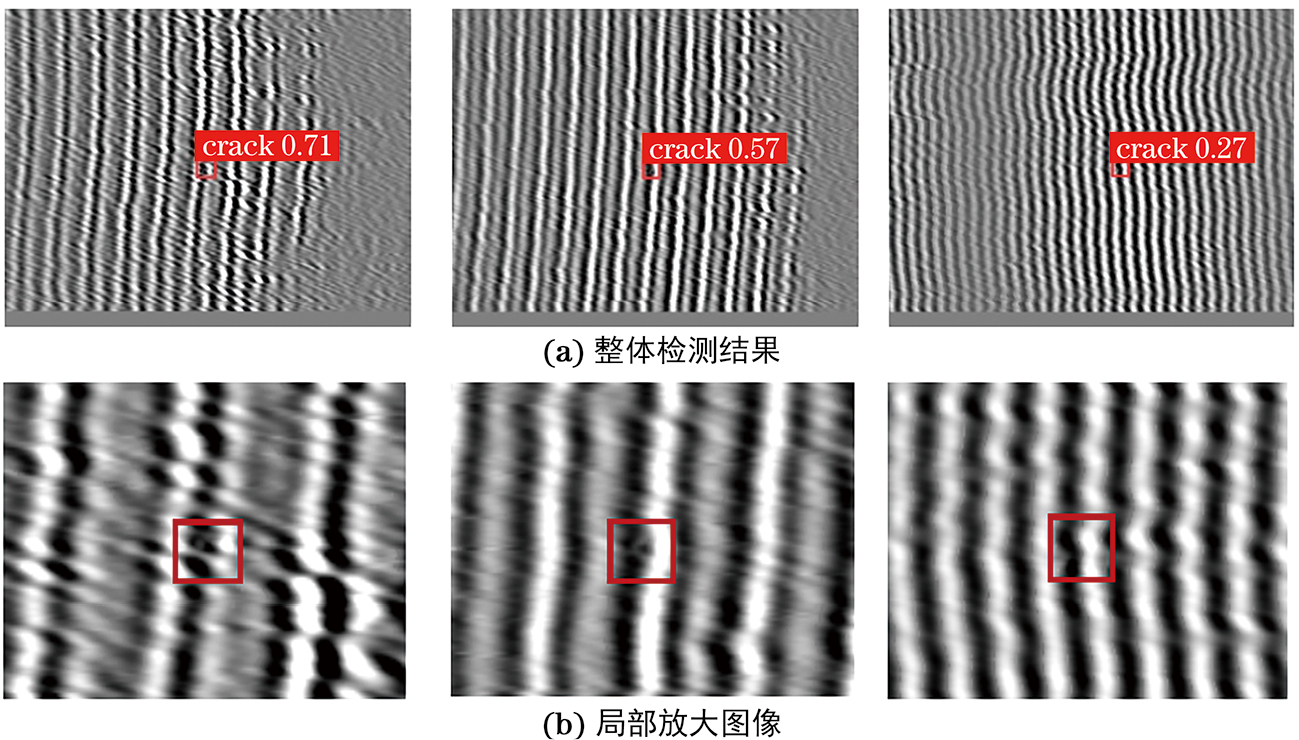
为了进一步验证所提方法在实际列车车轴检测中的有效性,对实际车轴进行了缺陷检测,并用检出率、误报率和漏检率评价测试结果。4种不同数据集在目标检测任务上的识别结果如表5所示,展示了在4种数据集的情况下实际缺陷的检出率、漏检率和误报率。结果表明,不同的数据增强对模型性能存在一定差异,在Real数据集上,模型表现出96%的检出率和4%的误报率,未出现漏检,说明在原始数据集上的表现相对较好;在经过裁剪(Crop)的数据集上,检出率提高至97.75%,误报率降低至2.75%,表现略有提升;采用Crop + simulation数据集和混合数据集,检出率分别达到98%和99.25%,误报率随之降低,尤其在混合数据集中,模型的性能指标最好,达到99.25%的检出率和仅0.75%的漏检率,误报为0%,其中对较大的缺陷都能100%检出,个别微小缺陷的检测结果示例如图5所示,可见该方法在小型缺陷检测上方面能力较强。
| 项目 | 数据集 | |||
|---|---|---|---|---|
| Real% | Crop | Crop+Simulation | Crop+Simulation+GAN | |
| 检出率 | 96.00 | 97.75 | 98.00 | 99.25 |
| 漏检率 | 4.00 | 2.75 | 2.00 | 0.75 |
| 误报率 | 0 | 0.75 | 0 | 0 |
基于深度卷积神经网络并通过多种数据样本增强方法,引入EMblock机制,提出一种基于EM-YOLO v5s的超声检测数据识别方法,有效提高了列车车轴缺陷的超声检测性能,最后验证了不同扩充数据对检测能力的影响。结果表明,所提出网络架构能适应相控阵探头的图像和扩充的不同数据的缺陷检测任务,与传统的YOLO v5s以及同类方法相比,该方法在性能上有明显提升,具有应用于实际车轴缺陷检测的水平和潜力。